粉体成形・油圧機器のユーザーニーズにお応えする─

 ロボット自動化システム
ロボット自動化システム
工場・研究所での活用事例のご紹介
自動化により作業性・生産性をアップできます
工場のラインや検査・研究の現場において、成形の前工程・後工程で使用できる自動化システムが活躍します。作業者の単純作業を減らして、「複雑な仕事に専念させたい」「バラつきを改善したい」「ミスを予防したい」。
NPaシステムがご提案しているロボットを活用したシステム例をご紹介します。
NPaシステムがご提案しているロボットを活用したシステム例をご紹介します。
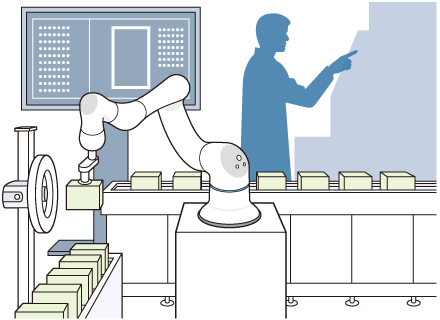
ピッキングと検査を効率化する「パレットチェンジャー移載システム」
パレットチェンジャーとロボットを同じユニットにし、自由なレイアウトを実現。コンベアから流れてきたワークをピッキングし、厚みを測定。良品のみをトレーに整列させ、トレーが満杯になれば新しいトレーに移載。
POINT-1
成形体をトレーに自動で移載
POINT-2
成形体の高さ測定からOK/NGを識別
POINT-3
狭いスペースでも、人協働ロボットによる自動化を実現
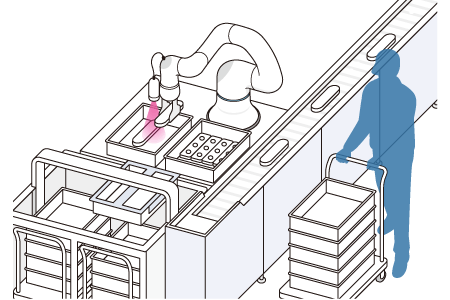
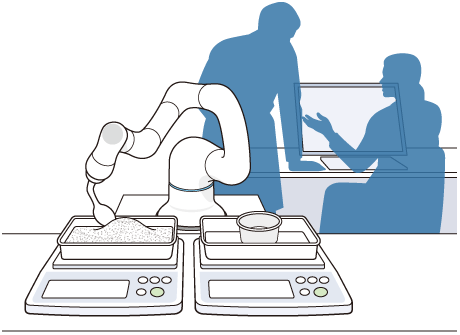
粉体の「自動分量システム」
研究者が必要な量をロボットに指示すると、スプーンを持ったロボットが粉を計量器へ移載。計量器からのフィードバックで、ロボットが自動的に必要な分量を調整。
POINT-1
すくう粉の盛り具合をセンシングで確認しつつ、秤を設置して目標値への微調整を実施
POINT-2
人協働ロボットが、すくう際と落とす際のスプーンの角度をAI で検知
POINT-3
加振装置などとの連動により落ちにくい粉を振るい落とし、定められた時間内に高精度での秤量が可能
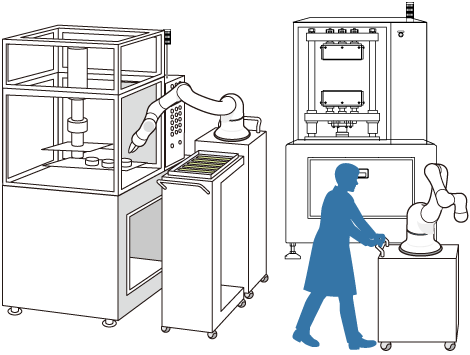
成形機からの「自動取り出しシステム」
装置の前に、ロボットを搭載した台車を設置。ロボットで成形体を取出し、容器に格納。
POINT-1
ワーク形状に合わせてハンドを付け替えることで、複数品種に対応
POINT-2
重量測定データを自動記録するなど、作業負荷を軽減
POINT-3
セルユニット化により、任意の場所へ容易に移動可能
いろいろな角度から検査できる「ロボット型外観検査システム」
ロボットにワークを持たせてカメラの前に移載。複数の面をカメラで写すことで、いろいろな角度からの検査が可能となり、傷の有無、異品種混入、文字検査などさまざまな種類の検査を実現。
POINT-1
検査機を使用することで、作業者ごとの検査基準のバラつきを解消
POINT-2
カメラ1台+ロボット1台でワークの多面検査が可能となり、費用の低減と省スペース化を両立
ロボット自動化システム 操作動画 >>操作動画一覧へ戻る
